
Tin tức
Hướng dẫn lập trình PLC Mitsubishi phát xung điều khiển servo
Chế độ điều khiển Servo là một phương pháp điều khiển chính xác và linh hoạt cho các hệ thống cơ khí và điện tử, đặc biệt trong các ứng dụng đòi hỏi độ chính xác cao và đáp ứng nhanh. Servo được sử dụng rộng rãi trong các ngành công nghiệp như tự động hóa, robot học, máy móc công nghiệp, điều khiển chính xác và các ứng dụng tương tự. Bài viết dưới đây, Dubai Electric sẽ hướng dẫn bạn lập trình PLC Mitsubishi phát xung điều khiển servo nhé!
Giới thiệu về chế độ điều khiển Servo
Chế độ điều khiển Servo dựa trên việc sử dụng một hệ thống phản hồi để điều chỉnh và điều khiển chuyển động của một động cơ servo. Hệ thống phản hồi bao gồm một bộ cảm biến, thường là bộ mã hóa hoặc cảm biến vị trí, để đo và phản hồi về vị trí hoặc tốc độ hiện tại của động cơ. Thông qua việc so sánh giữa giá trị phản hồi và giá trị đặt trước, hệ thống điều khiển servo sẽ tạo ra tín hiệu điều khiển điện thế hoặc dòng điện để điều chỉnh vị trí và tốc độ của động cơ.
Servo cung cấp khả năng điều chỉnh chính xác vị trí, tốc độ và lực của động cơ. Nó cho phép động cơ di chuyển một cách chính xác đến vị trí mong muốn và duy trì vị trí đó trong thời gian dài mà không bị dao động hoặc sai lệch. Điều này giúp tăng độ chính xác, đáp ứng nhanh và tính ổn định của hệ thống.
Chế độ điều khiển Servo có thể được cấu hình và điều chỉnh để đáp ứng các yêu cầu và ứng dụng cụ thể. Nó cung cấp các chế độ điều khiển như vị trí, tốc độ, lực, điều khiển PID (Proportional-Integral-Derivative), feed-forward và các chế độ mở rộng khác. Các tham số và cài đặt của chế độ điều khiển Servo có thể được điều chỉnh để tối ưu hóa hiệu suất và đáp ứng của hệ thống.
Hướng dẫn lập trình PLC Mitsubishi phát xung điều khiển servo
Để lập trình PLC Mitsubishi phát xung điều khiển servo, bạn có thể tuân theo các bước sau đây:
Bước 1: Chuẩn bị phần mềm lập trình
- Đảm bảo rằng bạn đã cài đặt phần mềm lập trình Mitsubishi phù hợp trên máy tính của mình, chẳng hạn như GX Works2 hoặc GX Works3.
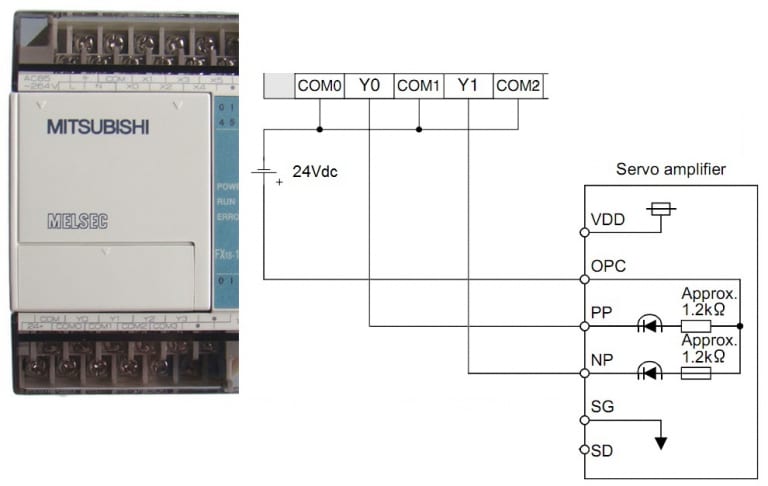
Bước 2: Kết nối PLC và servo
- Kết nối PLC Mitsubishi với servo thông qua giao diện và cáp kết nối thích hợp. Đảm bảo rằng kết nối cơ điện và mạch điện được thiết lập đúng và ổn định.
Bước 3: Mở phần mềm lập trình và tạo chương trình
- Mở phần mềm lập trình Mitsubishi trên máy tính.
- Tạo một chương trình mới hoặc mở chương trình đã tồn tại.
Bước 4: Lập trình điều khiển servo
- Sử dụng ngôn ngữ lập trình của Mitsubishi (chẳng hạn như ladder diagram, structured text, hay function block diagram) để tạo các lệnh và chức năng điều khiển servo.
- Sử dụng các hàm, địa chỉ và cấu trúc dữ liệu phù hợp trong phần mềm để truy cập và cấu hình các tham số servo như vận tốc, vị trí, gia tốc, phát xung, và các chế độ hoạt động khác.
Bước 5: Lập trình các chức năng bổ sung (tuỳ chọn)
- Nếu cần thiết, bạn có thể lập trình các chức năng bổ sung khác như giám sát, bảo trì, điều khiển từ xa, hoặc tích hợp với các thiết bị và cảm biến khác trong hệ thống.
Bước 6: Kiểm tra và xác nhận
- Kiểm tra chương trình đã lập trình bằng cách sử dụng chức năng mô phỏng hoặc kết nối thực tế với servo.
- Xác nhận rằng các lệnh và chức năng điều khiển servo hoạt động chính xác theo mong đợi và đáp ứng các yêu cầu và tiêu chuẩn của ứng dụng.
Bước 7: Tải chương trình vào PLC
- Sau khi hoàn thành lập trình và xác nhận, tải chương trình vào PLC Mitsubishi thông qua kết nối và các tùy chọn tải chương trình trong phần mềm lập trình.
Lưu ý: Quá trình lập trình và cấu hình điều khiển servo có thể có sự khác biệt nhất định tùy thuộc vào mô hình và loại servo Mitsubishi bạn đang sử dụng. Hãy tham khảo tài liệu hướng dẫn của nhà sản xuất và tài liệu kỹ thuật cụ thể cho từng mô hình servo để biết thêm chi tiết và hướng dẫn cụ thể.
Có thể bạn quan tâm:
- Tìm hiểu về bộ đếm xung tốc độ cao trong PLC Mitsubishi FX
- Các dòng PLC Mitsubishi được dùng nhiều nhất hiện nay
- PLC Mitsubishi dòng Q: đặc điểm, thông số, kỹ thuật, tài liệu\
- PLC là gì? Cấu trúc, nguyên lý hoạt động, ưu điểm và ứng dụng PLC